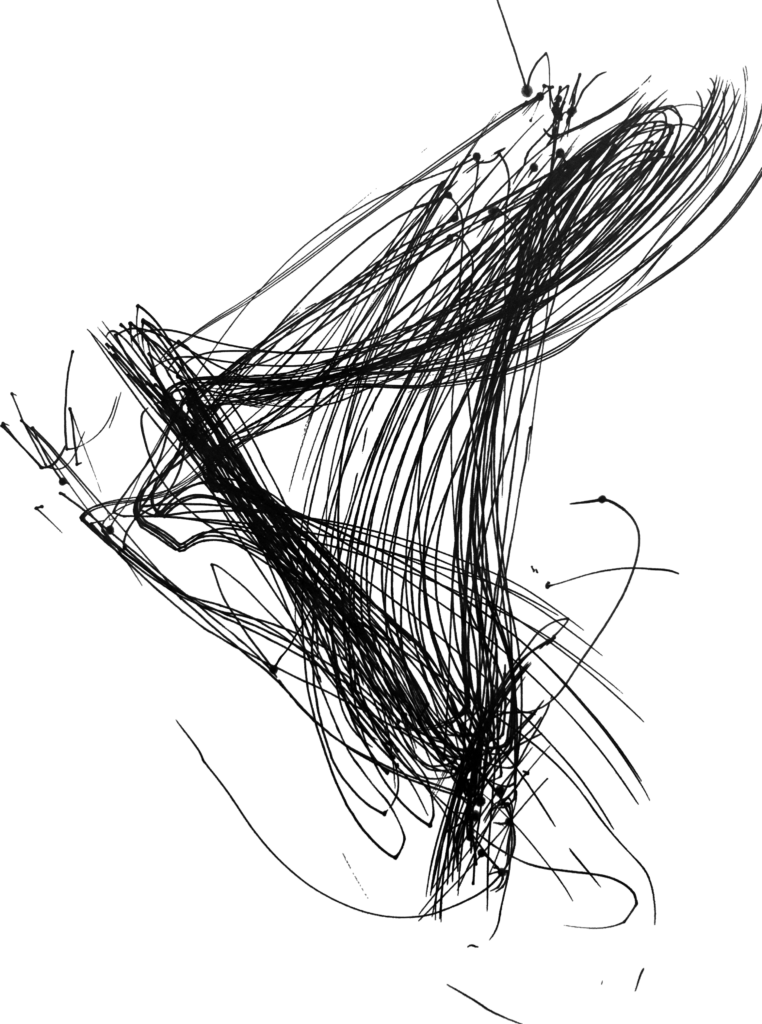
Robotic Harmonograph
Robotic Harmonograph investigates the translation of oscillatory motion into material traces through industrial robotic systems. Grounded in the mathematical principles of Lissajous figures, the project explores how computational parametrisation transforms robotic movement into emergent physical processes across diverse material conditions.

IN_Space
IN_Space investigates the translation of algorithmic data structures into spatial configurations through robotic procedures. Positioning the robot not as a mechanical tool but as a cognitive interface between data, perception and materialisation, the project develops rule-based systems that transform external information sources into modular spatial systems across diverse materialisation methods.
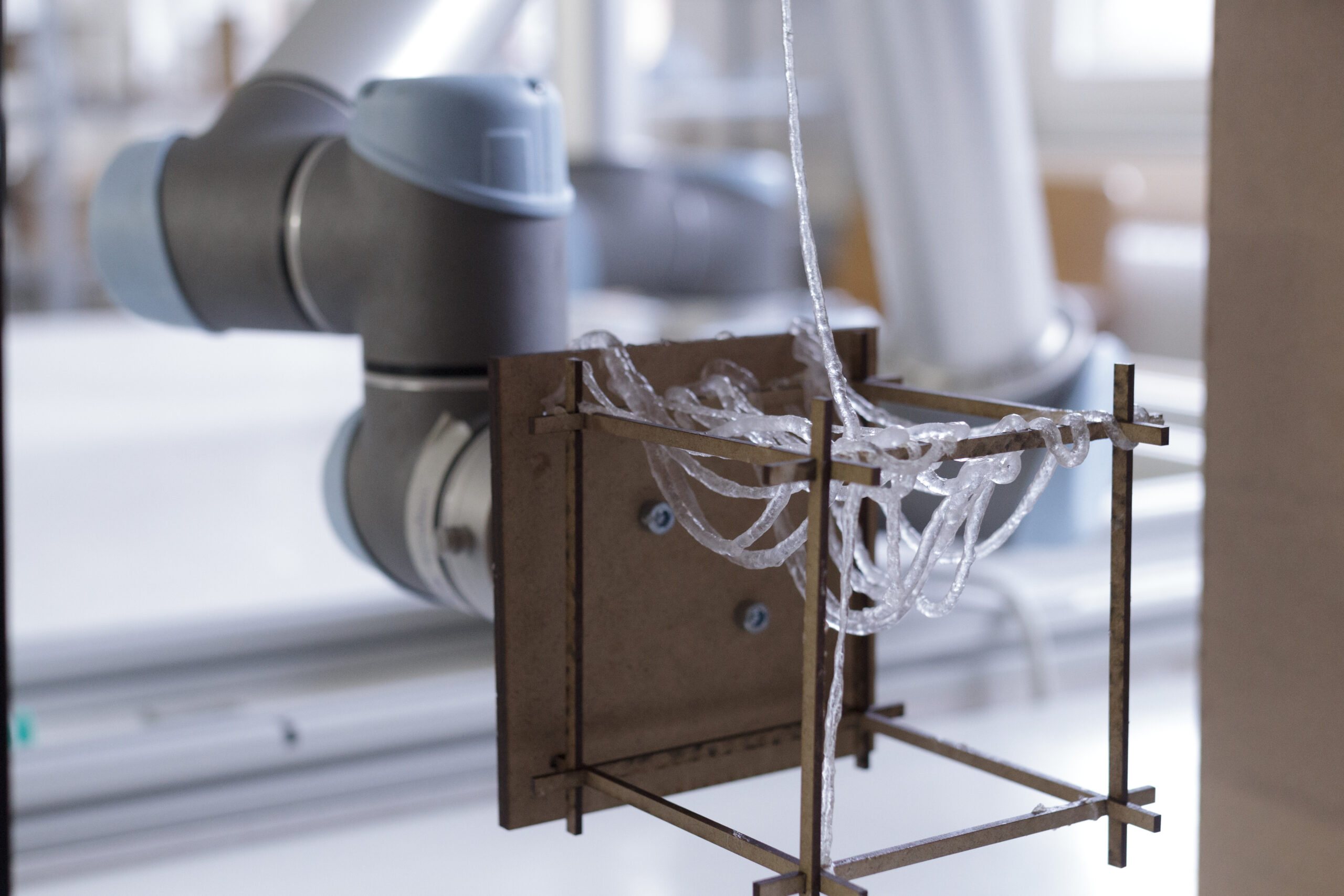
Material Exploration
Material Exploration investigates the generative potential of materials as active agents in spatial and architectural formation. Working with biological and chemical processes the project develops material-driven procedures that replace conventional form-finding with emergent, process-dependent outcomes. Analogue material experiments are translated into digitally controlled sequences through digitally controlled systems, tracing a path from material behaviour to spatial configuration.